Viktiga Slutsatser
- Självkörande fordon är beroende av tekniker för maskinseende för att tolka omgivningen. Detta möjliggör upptäckt av objekt, identifiering av vägskyltar och navigering.
- Maskinseendet i självkörande bilar bygger på samverkan mellan kamerasystem, lokal databearbetning (edge computing) och artificiella intelligensalgoritmer. Dessa komponenter samlar in visuell information, bearbetar den omedelbart och känner igen mönster samt objekt.
- Maskinseende är en nyckelkomponent för att nå full autonomi i självkörande bilar. Det möjliggör klassificering av objekt, detektering av filer och trafiksignaler, identifiering av vägskyltar och igenkänning av trafik. Framtida utveckling av självkörande fordon är beroende av framsteg inom AI, lokal databearbetning och kamerateknik.
Självkörande bilar har kontinuerligt väckt stort intresse. Även om vi ännu inte ser fullständigt autonoma fordon, har vi nu bilar med avancerade förarassistanssystem (ADAS) som kan styra automatiskt, byta fil, parkera och upprätthålla en adaptiv farthållare.
Ett självkörande fordon använder en mängd sensorer för sina ADAS-funktioner. Maskinseende är dock centralt för att upptäcka, identifiera och beräkna avståndet till objekt och den allmänna omgivningen. Utan maskinseende skulle självkörande bilar med farthållare och autopilot vara nästintill omöjliga.
Vad är Maskinseende?
Maskinseende är en teknik som ger maskiner förmågan att ’se’ och känna igen objekt i deras omgivning. Det är en specialiserad gren av datorseende som fokuserar på industriella användningsområden, särskilt för synorienterad objektdetektering i autonoma maskiner som robotar och fordon.
I dagens läge utnyttjar maskinseende AI-baserade djupinlärningsalgoritmer, såsom faltningsneurala nätverk (CNN), för att skapa tillförlitliga och generaliserbara modeller. Dessa modeller kan exakt identifiera objekt under olika förhållanden. Detta möjliggör användning av maskinseende i olika applikationer där hög tillförlitlighet är avgörande, som tillverkning, jordbruk, robotik och bilindustrin.
Hur Fungerar Maskinseende i Självkörande Bilar?
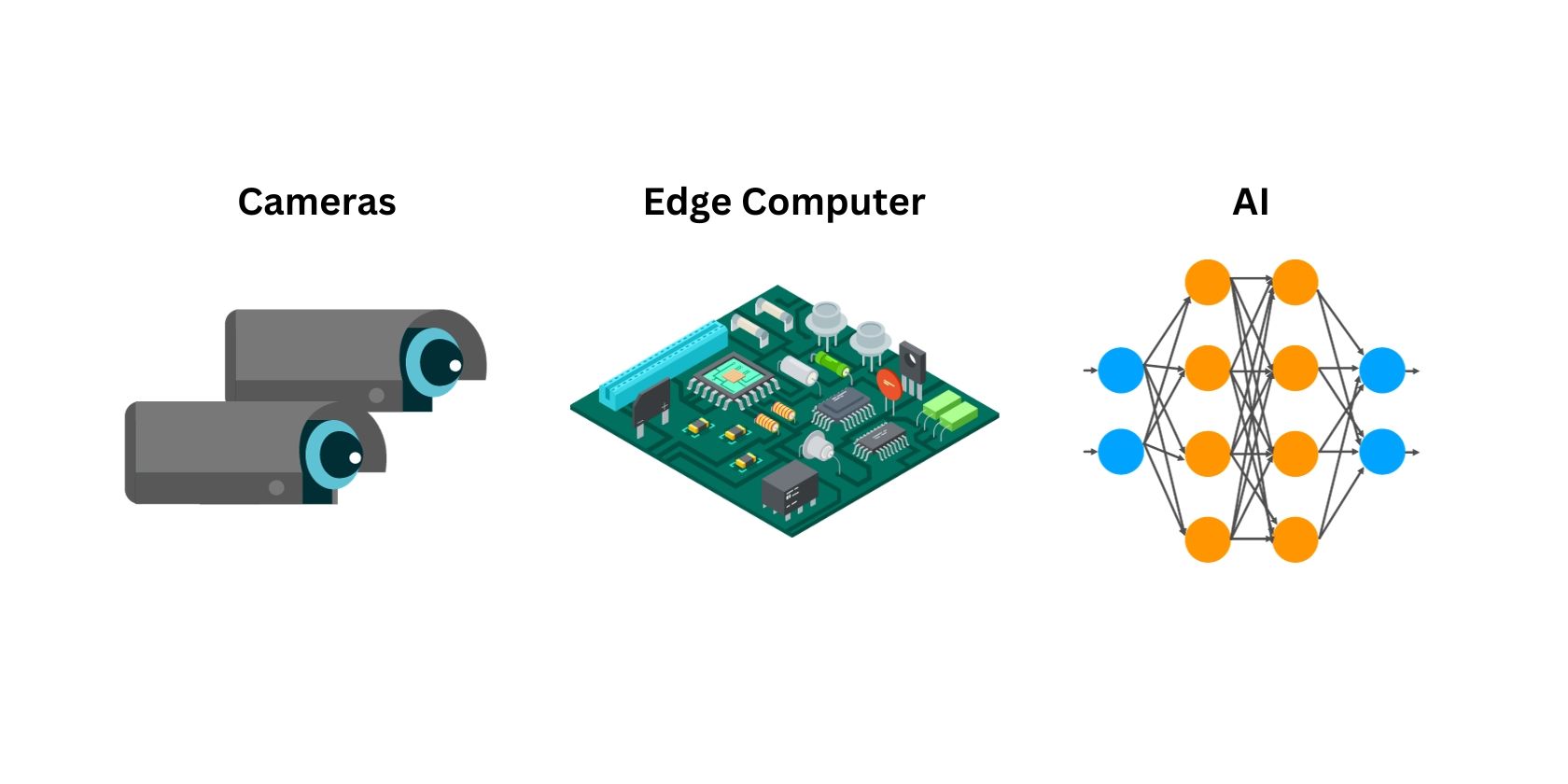
Maskinseende i självkörande fordon kan i grunden delas in i tre huvuddelar: kamerasystem, bearbetning (lokal databearbetning) och artificiell intelligens. Denna teknikstack gör att ett autonomt fordon kan ’se’, ’tänka’ och identifiera vägmärken samt hinder under körning. Låt oss gå in på varje del mer i detalj för att förstå hur dessa teknologier samverkar för att forma maskinseendet hos ett självkörande fordon.
Kamerasystem
Maskinseende är starkt beroende av kamerasystem för att samla in visuell information om miljön. Självkörande bilar använder flera kameror som placeras runt bilen för att samla in så mycket visuell data som möjligt.
Två primära sensorer används i maskinseendekameror: komplementära metalloxidhalvledare (CMOS) och laddningskopplade enheter (CCD). För självkörande bilar är CMOS ofta det föredragna valet på grund av dess höga avläsningshastighet, inbyggda elektronik och parallella bearbetningskapacitet. Detta gör CMOS till en snabbare sensor, även om den är mer mottaglig för brus eller artefakter. Olika metoder, såsom anpassade ljuslägen, digitalt mörkerseende och filter, kan hjälpa CMOS-sensorn att hantera situationer med sämre ljusförhållanden.
För att ge stereoskopisk syn, är kameror i självkörande fordon placerade på specifika avstånd från varandra. Stereoskopisk syn är förmågan att kombinera två eller fler visuella intryck och skapa en känsla av djup eller tredimensionalitet i objekt och omgivningar. Detta gör det möjligt för bilarna att triangulera och beräkna det ungefärliga avståndet mellan objektet och bilen.
Människor har nytta av stereoskopisk syn tack vare våra två ögon. Du kan testa det själv: stäng ena ögat och fokusera på ett mindre objekt på ditt skrivbord. Placera sedan din hand på sidan av objektet och se till att objektets spets är minst fem centimeter bort. Gör en bedömning, ta en paus och öppna sedan båda ögonen. Du kommer att uppleva att din djupuppfattning blir mycket bättre.
Lokal Dator (Edge Computer)
Medan kamerasystemet i den självkörande bilen samlar in data, bearbetar en inbyggd dator (lokal processor) all information i realtid. Detta ger omedelbara uppdateringar om omgivningens tillstånd. Vanliga maskinseendeuppgifter kan visserligen vara ekonomiskt fördelaktiga med molntjänster, men för självkörande bilar är risken för beroende av molntjänster helt enkelt för stor. Även om det skulle handla om att outsourca delar av maskinseendeprocessen.
Genom att använda en lokal dator (edge computer) för att bearbeta data, elimineras latensproblem. Detta säkerställer att information tas emot, bearbetas och kommuniceras i realtid. Lokala datorer i självkörande bilar använder specialiserad hårdvara som integrerar AI-grafikprocessorer, som NVIDIAs Tensor Core och CUDA Cores.
AI-Algoritmer
Algoritmer har alltid varit en central del av maskinseende. Det är algoritmerna som ger datorer förmågan att identifiera mönster, former och färger som samlats in av kamerasystemet. Användning av AI istället för mer traditionella maskinseendealgoritmer förbättrar avsevärt förmågan hos självkörande fordon att tillförlitligt identifiera objekt, vägskyltar, vägmarkeringar och trafikljus. Många AI-algoritmer används för att träna självkörande bilar. De vanligaste är:
- YOLO (You Only Look Once): En algoritm för objektdetektering i realtid som identifierar och spårar objekt inom bilens synfält.
- SIFT (Scale-Invariant Feature Transform): Används för att extrahera detaljer och hjälper bilen att känna igen distinkta landmärken och objekt i sin omgivning.
- Histogram of Oriented Gradients (HOG): Används för objektigenkänning och fokuserar på att extrahera lokala mönster och gradienter från bilder.
- TextonBoost: En algoritm som hjälper till med objektigenkänning genom att analysera texturer i miljön.
- AdaBoost: Används för dataklassificering, kombinerar flera svaga klassificerare för att fatta starka beslut gällande objekt och hinder i fordonets väg.
Betydelsen av Maskinseende i Självkörande Bilar
 Bildkälla: Automobile Italia/Flickr
Bildkälla: Automobile Italia/Flickr
Maskinseende är det primära sättet för en självkörande bil att uppfatta och förstå sin omgivning. Utan maskinseende är det mycket sannolikt att självkörande bilar skulle hamna på nivå 1 i fordonets autonomiskala och eventuellt aldrig uppnå full autonomi.
Med hjälp av maskinseende kan självkörande fordon nu utföra objektklassificering, fil- och signaldetektering, identifiering av vägskyltar och igenkänning av trafik.
Trots att många självkörande fordon nu använder olika sensorer, såsom LIDAR, RADAR och SONAR, är alla dessa system starkt beroende av maskinseende för att tolka miljön, identifiera objekt och förstå betydelsen av skyltar och trafikljus på vägen. Dessa ytterligare sensorer är endast till för att förbättra maskinseendet och främja säkerheten för människor, djur och egendom.
Maskinseende kan dock fungera oberoende utan hjälp av andra sensorer för att tillhandahålla autopilotfunktioner. Faktum är att Teslas nyaste självkörande bilar har tagit bort RADAR och förlitar sig nu enbart på maskinseende för sitt autopilot system.
Detta innebär inte att andra sensortekniker är onödiga, men det understryker vikten och kraften i maskinseende för självkörande fordon.
Framtiden för Maskinseende i Autonoma Fordon
Maskinseende är grunden för självkörande bilar. Med hjälp av maskinseende kan fordon ’se’ och tolka omgivningen på samma sätt som människor. Trots att utmaningar kvarstår, kan fördelarna med maskinseende i form av säkerhet och navigering inte underskattas. När det gäller framtiden för autonoma fordon kommer alla ytterligare framsteg inom AI, lokal databearbetning och/eller kamerateknik säkerligen att öka förmågan hos självkörande fordon och leda till en högre nivå av automatisering.